How did I not know about this Fusion 360 facility ?
I was watching a YouTube video on Fusion 360 joints by Garin Gardiner. I couldn’t help but notice that he had colours on his assembly listing and time line. My interest was really perked…..
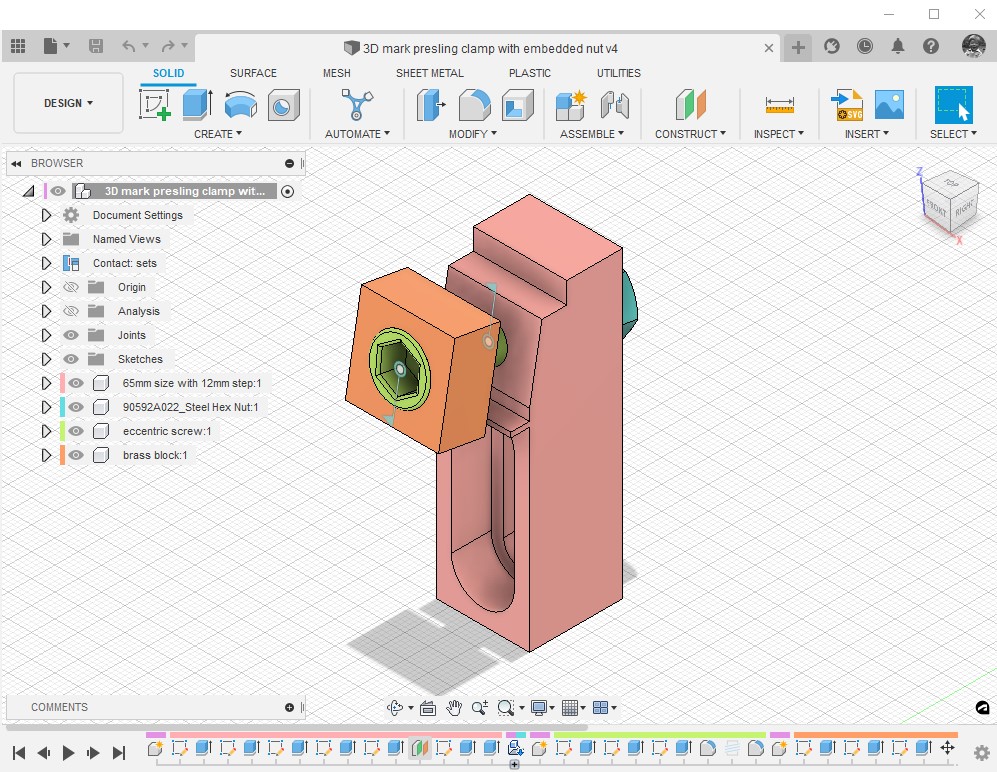
A quick search revealed that this is a standard but maybe not so obvious Fusion 360 feature. Go to the Inspect drop down menu and then Display Component Colours. Magic (albeit it can be a bit garish ..) but it really helps you to see what part or function is with what. If you start to feel a bit nauseous you just have to use Shift+N to toggle it ON and OFF.
Here is my recent Mark Presling clamp in Technicolor. (OK the colours could be better chosen ..).
It’s funny how sad engineers get all excited about such simple things……
Links to similar or related post are listed below : –
- Automated 3D printed collet storage using Fusion 360 parameters
- Fusion 360 Keyboard Shortcuts
- Creating a worm drive in Fusion 360
- Fusion 360 Parameter Lookup Sheet
- Adding Colour Coding to Fusion 360 Assemblies
- Adding a logo to a Fusion 360 model
- Two important Fusion 360 Preferences tips
- 3Dconnexion Spacemouse has better Fusion 360 integration
- Try again after update completes Fusion 360 Error Message
- Fusion 360 Electrical Personal Library tip
- Automated 3D printed collet storage using Fusion 360 parameters
- Fusion 360 Keyboard Shortcuts
- Creating a worm drive in Fusion 360
- Fusion 360 Parameter Lookup Sheet
- Adding Colour Coding to Fusion 360 Assemblies
- Adding a logo to a Fusion 360 model
- Two important Fusion 360 Preferences tips
- 3Dconnexion Spacemouse has better Fusion 360 integration
- Try again after update completes Fusion 360 Error Message
- Fusion 360 Electrical Personal Library tip